2023-03-07 10:54
2023-03-07 10:54 [导读]
[导读]
制造业中,按照产品的生产加工方式,主要分为离散型制造和流程型制造两种不同模式。离散制造是指多个零件经过一系列并不连续的工序加工,最终装配而成产品的过程;流程制造则是指加工对象通过一系列加工流程最终从原材料变为半成品或成品的过程。流程制造模式常见于化工材料、食品加工、印刷造纸、有色金属、钢铁制造等行业中。
01流程型制造特点
相比于离散型制造,流程型制造模式的特点在于:
- 工艺流程固定:流程型制造模式下的产品生产一旦确定投产,工艺流程和厂房设备就会固定下来,很长时间内不会改变,若要对其进行改造,成本会很高;
- 工序衔接紧密:整个生产制造流程相互耦合,一环扣一环,制造工序不能中断,一旦某个环节停顿或者慢下来,就会对之后的工序产生影响;
- 加工流程长且复杂:原材料从入库,经过加工到最后成品出库,往往会经过多个产线,以及在缓存区、存储区、原材料库、半成品库、成品库等多个区间转运存储,加工流程长,物料运输路线复杂。
制造模式不同,实现工厂内部物流自动化升级的也会遇到不同的难点,必须结合企业的制造模式,因时制宜,才能解决客户的真正难点痛点。全球工业无人车辆领军企业未来机器人为流程制造模式客户,提供软件硬件产品一体化的内部物流无人化解决方案;贴近客户需求,在几乎不改变客户厂房设备布置的前提下,助力客户降本增效。
02软件硬件实力兼备
> 产品稳定高效,覆盖工序衔接
流程型制造的核心关键在于工序之间连续稳定生产,作为主要衔接工序之间物料转运作业的无人叉车,稳定可靠的产品性能和连续高效的作业效率是十分重要的。
未来机器人旗下P系列、Slim系列、R系列、L系列 等无人叉车,覆盖流程型制造模式下常见的室内平面转运、线边转运、货架存取、室外长距离转运等场景,快速响应任务需求,高效衔接工序流程,提升物料转运效率。
- VNP15平衡重托盘堆高无人叉车
适用场景:平面转运、线边转运、货架存取、货物堆叠等。

- VNSL14托盘堆高无人叉车
适用场景:窄通道平面转运、线边转运、低位存取等。

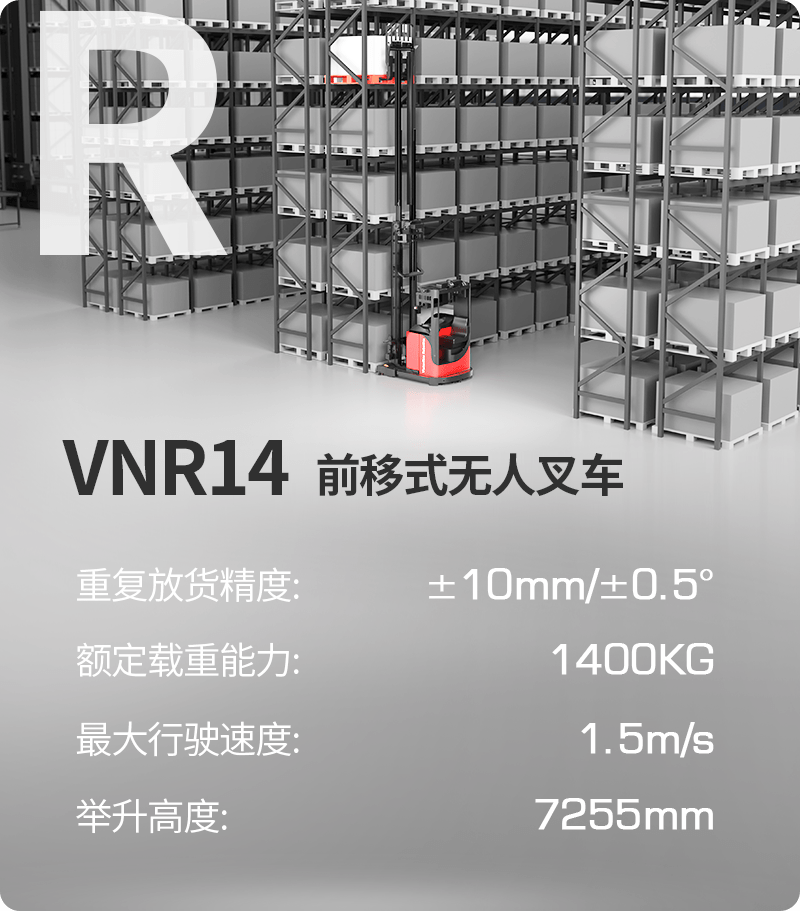
- VNR14前移式无人叉车
适用场景:室内平面转运、线边转运、高位存取等。
- VNL14托盘堆高式无人叉车
适用场景:室内平面转运、线边转运、货架存取等。

- VNQ60无人牵引车
适用场景:室内外全天候、长距离、大吨位物料牵引。

> RCS 系统对接,智能调度
把流程型制造的每道工序及工序上的自动化设备比作一个个岛屿,系统就是联通这些岛屿的通道。
未来机器人自主研发RCS 中控调度系统对接客户上位系统,打通设备数据,让无人叉车能无缝对接企业车间中的输送线、提升机、机械臂等各种自动化设备;通过智能调度和路径规划,分配任务给到无人叉车,让物料通过系统规划的“管道路径”实现无人化转运。
03
“智造”转型案例
> 未来机器人 X 化工新材料企业
解决方案:
未来机器人RCS 系统+2台 VNP15平衡重堆高式无人叉车+VNQ60无人牵引车
项目成果:
室内VNP15无人叉车对接物料输送线与平板拖车,实现从涂料车间到缓存区之间的原材料转运;
室外规划VNQ60无人牵引车停靠点,VNQ60无人牵引车根据生产需求将原材料运送至各个车间,完成室外物料转运作业流程,实现全流程物流无人化升级。> 未来机器人 X 印刷包装企业
解决方案:
未来机器人RCS 系统+2台 VNSL14托盘堆高式无人叉车
项目成果:
2台VNSL14托盘堆高式无人叉车分别部署在项目一楼二楼,对接提升机和输送线,完成半成品出入库流程,实现仓储物流自动化管理。

> 未来机器人 X 食品加工企业
解决方案:
未来机器人RCS 系统+ VNR14前移式无人叉车+VNMR15小型前移式无人叉车
项目成果:
VNR14前移式无人叉车与VNMR15小型前移式无人叉车分别部署在项目A、B两个区间。项目A区,VNR14前移式无人叉车根据任务需求,实现半成品从入库缓存区-高位货架区-出库缓存区之间往返转运。
在项目B区,2台VNMR15小型前移式无人叉车对接辊筒线,将半成品物料从辊筒线转运至出库缓存区。
关于未来机器人
「未来机器人」VisionNav® 是全球领先的工业无人车辆及内部物流无人化方案供应商。通过将5G通信、人工智能(AI)、环境感知、深度学习、伺服控制等核心技术应用于工业无人驾驶领域,未来机器人研发了多场景适用的9大系列无人叉车和无人牵引车产品。未来机器人解决方案覆盖内部物流全栈场景,并突破9.4米高位存取、2.0米窄通道存取、无人装卸车、多层料框堆叠等核心刚需场景应用。目前,未来机器人业务遍及全球30多个国家和地区,在全球累计销售1500+产品,落地200+项目,与50+世界500强企业达成了合作,业务覆盖汽车制造、轮胎、食品、石化、电商、3PL、制药等多个领域。