2022-07-04 14:18
2022-07-04 14:18 [导读]
[导读]货架的生产、组装/安装的公差、变形和净距,对货架功能实现、搬运设备的运行具有重要作用,对于确定货架的可靠性以确保搬运设备撞击、托盘撞击或系统崩溃的几率在可接受的范围内也是很重要的。货架公差、变形和净距是货架结构设计安全的基础。
规划者有责任与用户协作,确保使用的公差、变形和净距对整体系统的安全操作是可接受的。在达到同等安全操作的情况下,规划者可以进行适当的设计/计算来改变某些参数。
考虑搬运设备的一般要求,货架公差、变形与净距分为不同组别,每个组别对应货架进行安全操作需要不同的公差、变形与最小净距。
本文讲述与配备堆垛机的横梁式货架相关的安装公差。
一、堆垛机控制系统分类
堆垛机可配备不同种类的定位控制系统,可实现:
——X向与Y向的坐标定位
——X向与或Y向的局部精准定位
控制系统分为以下几类:
A类 手动控制;
B类 部分或完全自动控制的坐标定位;
C类 部分或完全自动控制的坐标定位以及仅Y向的货格精准定位;
D类 部分或完全自动控制的坐标定位以及X向与Y向的货格精准定位。
注:B类与C类控制系统的自学习过程有助于降低堆垛机操作净距。
二、货架分类
自动化立库货架的巷道非常窄,巷道宽度仅能容下堆垛机和存储单元宽度加操作净距,如下图所示。
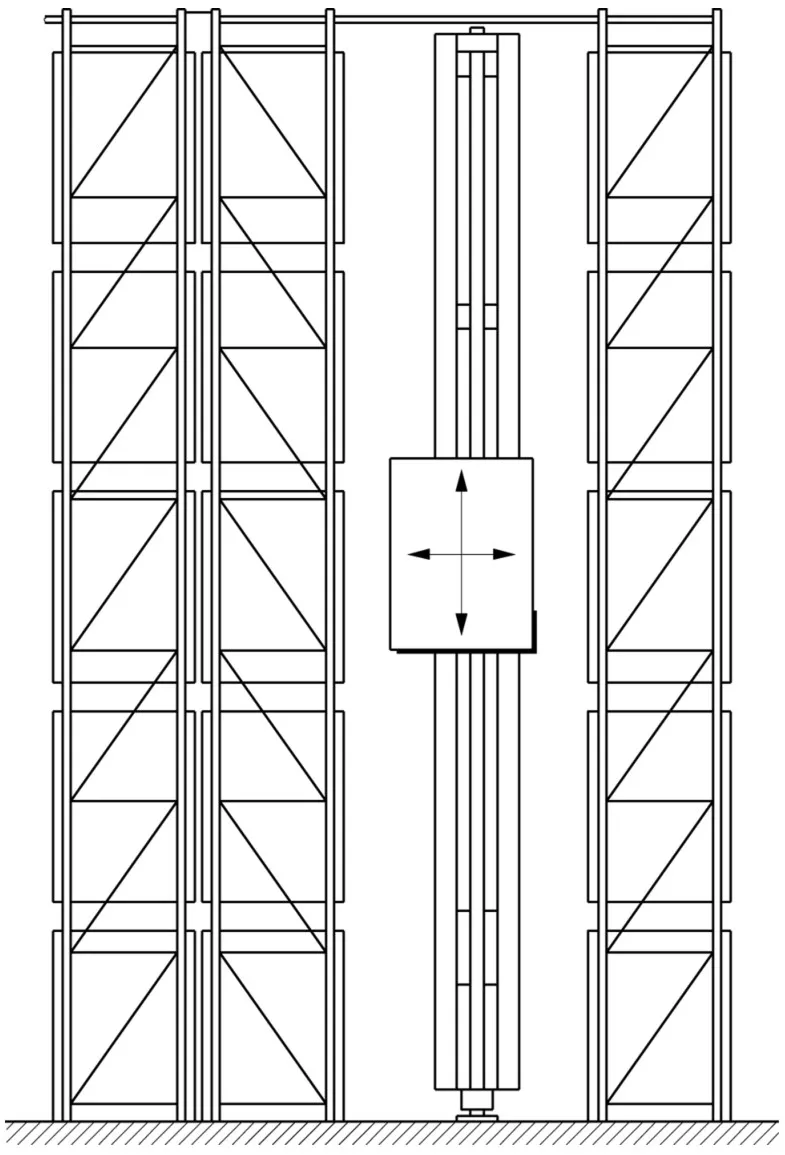
图1 普通横梁式货架的水平与竖向公差
货架的公差与变形影响操作安全。某种程度上,容许限值取决于控制系统、搬运设备与存储单元(进叉孔尺寸)的类型。为了简化起见,仅定义两类与货架设计相关的公差范围。
2.1 Class 100:(低标准公差限值)
以配备B类控制系统、无精准定位辅助的堆垛机为主。一般应用于轻型、低到中等高度(约18m以下)的货架。之所以是18m,是因为对于更高的货架,立柱轴向压缩变形要求必须设置Y向精准定位系统。
2.2 Class 200:(高标准公差限值)
以配备A、C、D类控制系统、有精准定位辅助或手动控制的堆垛机为主。
对于自动化系统,集成商应进行“公差-变形-净距”评估并确定所需净距,借此可以确定控制系统的类型。
三、安装公差
如下列图所示。
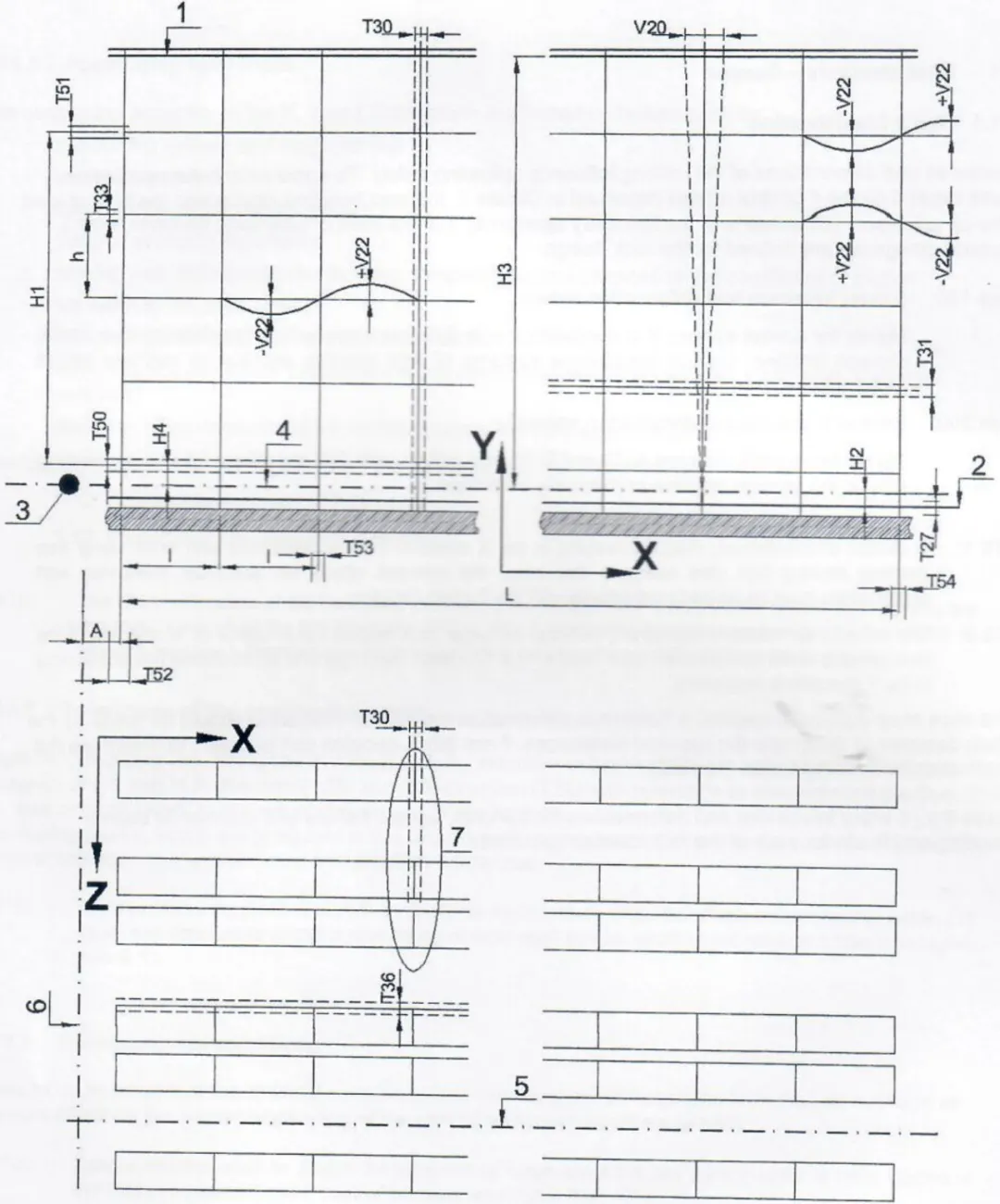
1 天轨(导向轨)底面
2 地轨(运行轨)顶面
3 基准点(固定标识)
4 X-Z基准面
5 X基准轴(固定标识)
6 Z基准轴(固定标识)
7 局部图
(a)
1 巷道
2 立柱半宽加15mm(1/2 T30)
3 立柱宽度加容差范围30mm(T30)
4 立柱网格轴线
(b)
1 堆垛机竖向轴
2 局部图
3 巷道
(c)
图2 横梁式货架公差示意图
3.1 X向公差
- 相对的立柱因柱脚错位、立柱倾斜与初始弯曲导致的在立柱全高范围内的公差(T30):±15mm
- 相邻立柱中心线距离公差(T53):±3mm
- 首根立柱中心线距离水平横向基准线距离公差(T52):±10mm
- 货架整体长度(L)偏离名义长度公差(T54):40m以下,±20mm;40m以上,±0.5‰L
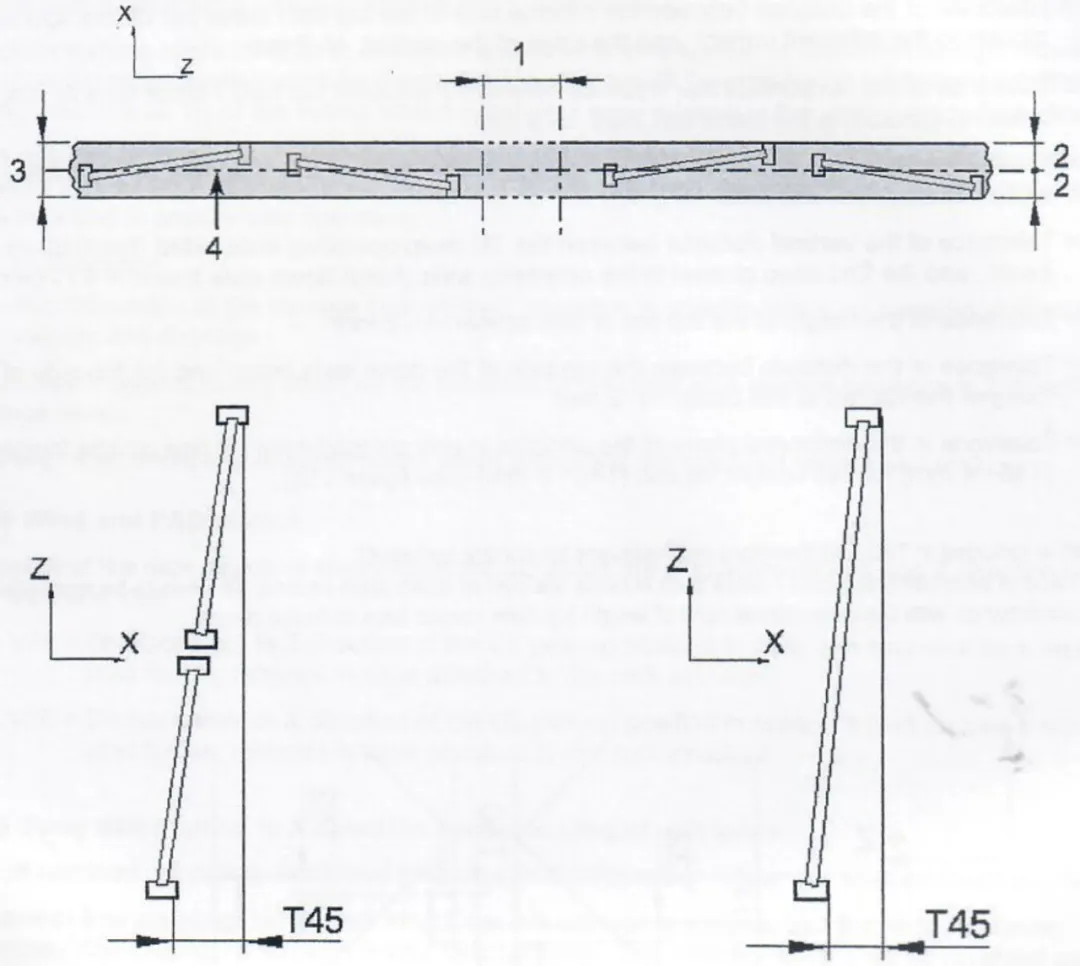
- 对于D类控制系统,立柱组两立柱位置偏离公差(T45):4mm
3.2 Z向公差
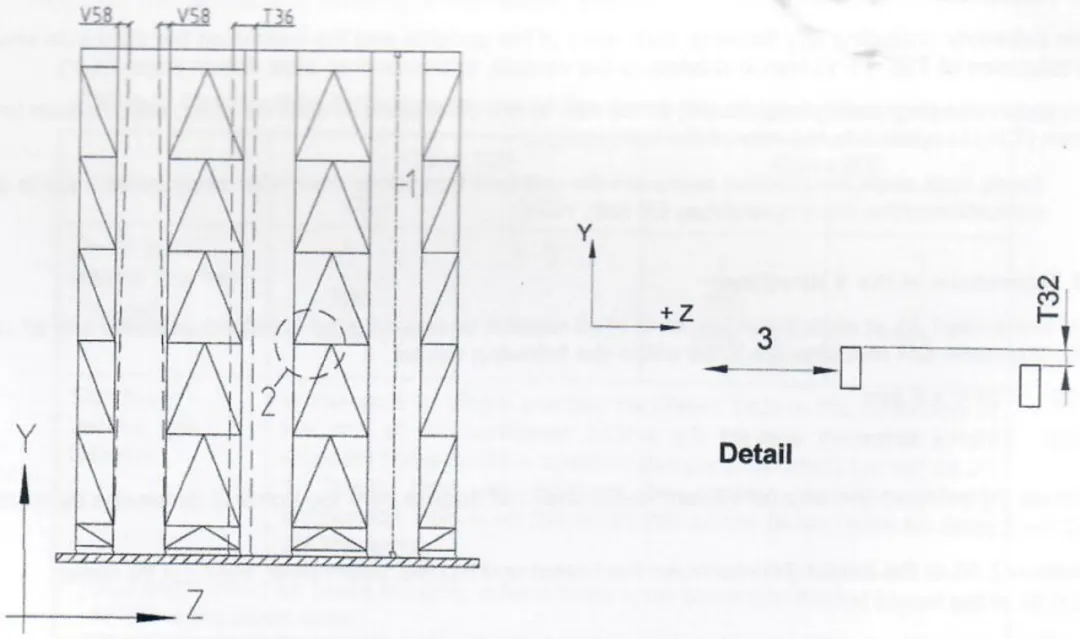
- 巷道两侧立柱或横梁最外缘(含配件,如螺栓等)相对于竖直基准面(XY平面)公差(T36):±15mm
3.3 Y向公差
- 巷道两侧所有横梁每层层高偏离名义尺寸公差(T31):Class 100,±5mm;Class 200,±10mm
- 相邻层间距(h)偏离名义尺寸公差(T33):±5mm
- 首层与顶层间距(H1)偏离名义尺寸公差(T51):±0.5‰H1
- 首层横梁相对于固定基准面的水平公差(T50):±5mm
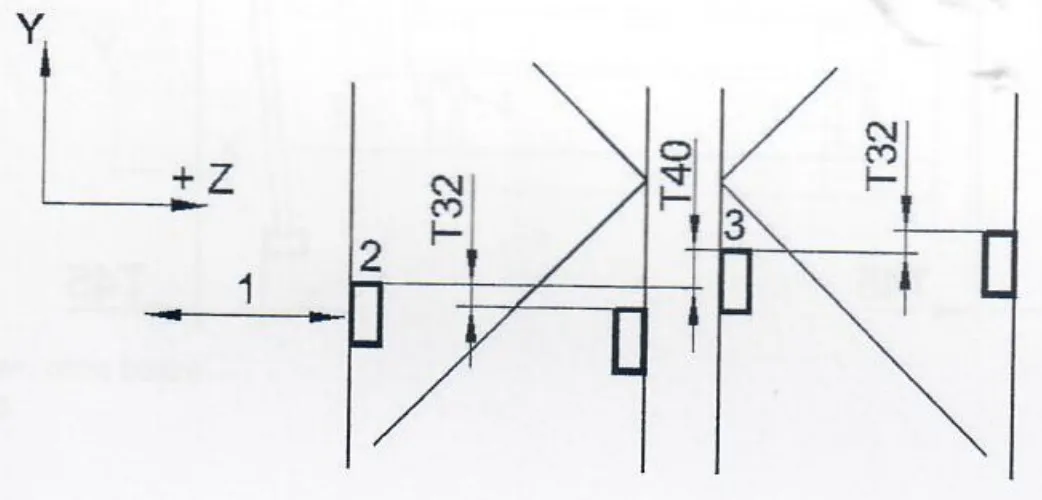
- 背部横梁相对于前部横梁(巷道内)水平公差(T32):+2mm/-4mm(+表示背部高)
需要注意的是,货架立柱X向安装倾斜公差V20与Y向安装倾斜公差V58是由堆垛机供应商与货架供应商沟通确定。由于V20属于T30的一部分(V58也属于T36的一部分),因此V20必须小于T30。
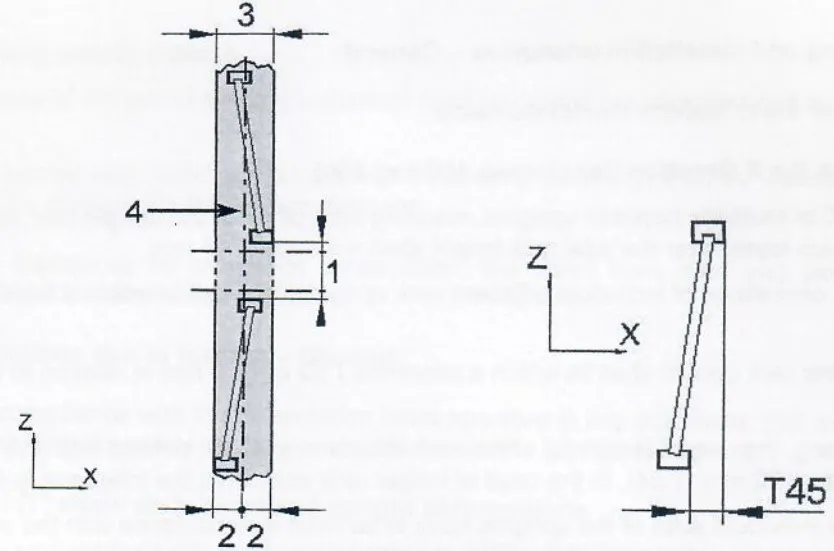
3.4 双深位货架公差
1 巷道
2 第一深位横梁(靠近巷道侧)
3 第二深位横梁
(a)
(b)
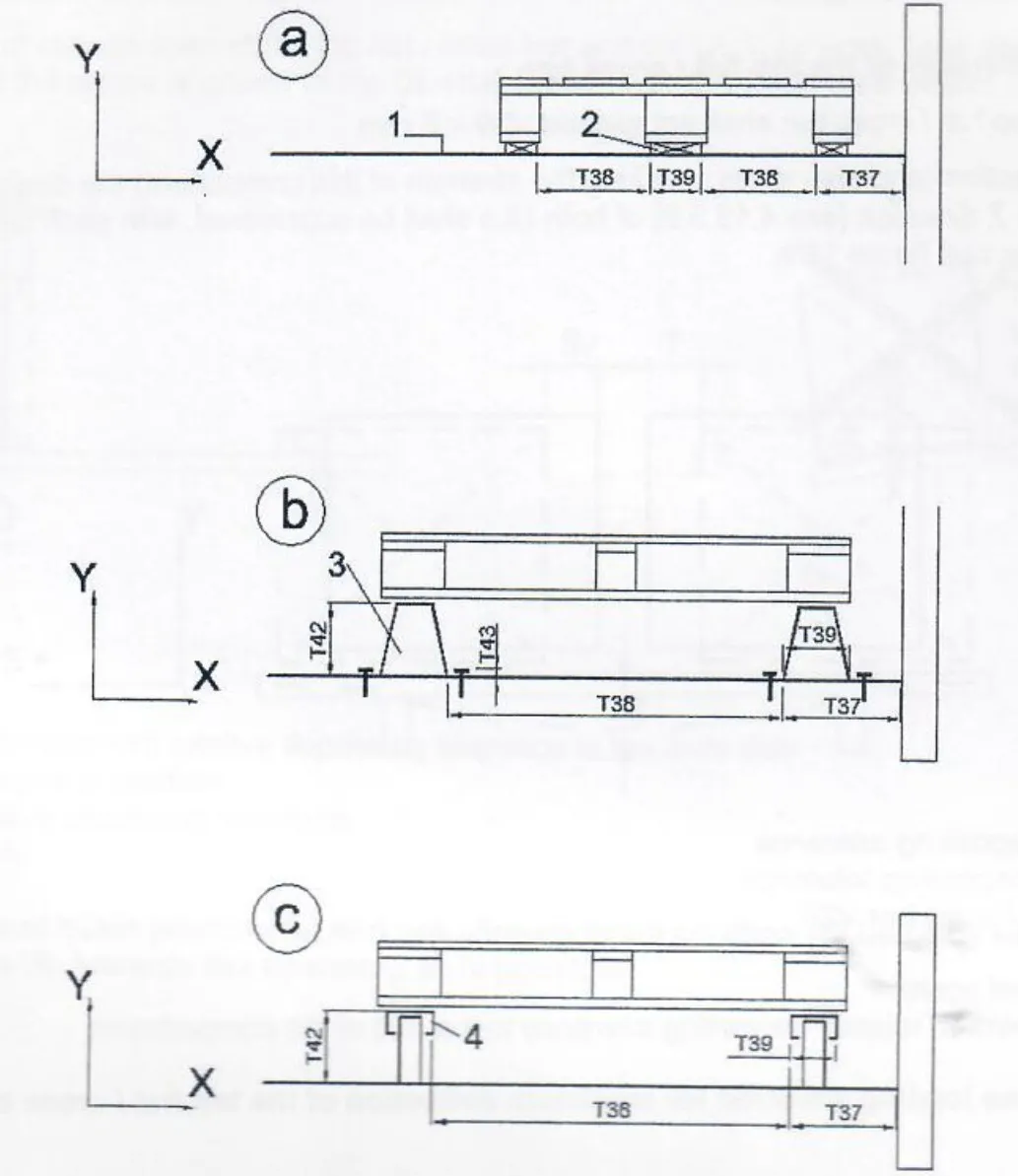
1 横梁上表面
2 叉齿垫块
3 帽形跨梁
4 跨梁
(c)
图3 双深位横梁式货架公差示意图
对于上图所示的双深位横梁式货架,除了满足以上公差,还应额外考虑:
- 叉齿垫块/跨梁内侧距相邻立柱侧边的距离公差(T37):±2mm。
- 支承同一存储单元的相邻叉齿垫块/跨梁的距离公差(T38):±2mm。
- 叉齿垫块/跨梁最大宽度公差(T39):±2mm。
- 第一深位靠近巷道的横梁与第二深位靠近巷道的横梁竖向公差(T40):+4/-6mm。
- 叉齿垫块/跨梁上表面距横梁上表面的距离公差(T42):±2mm。
- 帽型跨梁固定螺栓上表面距横梁上表面的距离公差(T43):±2mm。
- 同一货格立柱组位置偏离公差(T45):单立柱组,4mm;双立柱组,8mm。
撰文背景
关于稳图WESAFE
稳图公司(WESAFE)成立于2009年,致力于提供专业的仓储安全解决方案,包括货架安全检测,物流动线安全防护、厂区物流安全可视化及“安全货架系统项目集成。
编辑转发只为传递更多信息,并不代表本号观点。
如有侵权,请联删。