2022-11-30 16:15
2022-11-30 16:15 [导读]
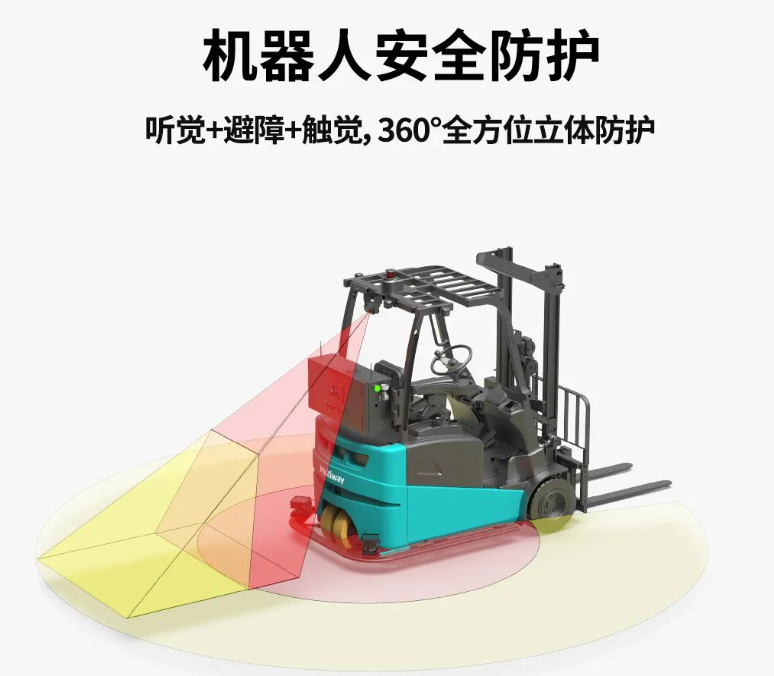
[导读]全球工业无人车辆领军企业未来机器人最新视觉+3D激光导航无人叉车经过一系列严格的评估和测试,正式获得欧盟CE安全认证证书,获得此次CE认证的具体车型为未来机器人P系列、R系列及E系列无人叉车。
“欧盟史上最全面最严格”考核
获极高标准安全保证
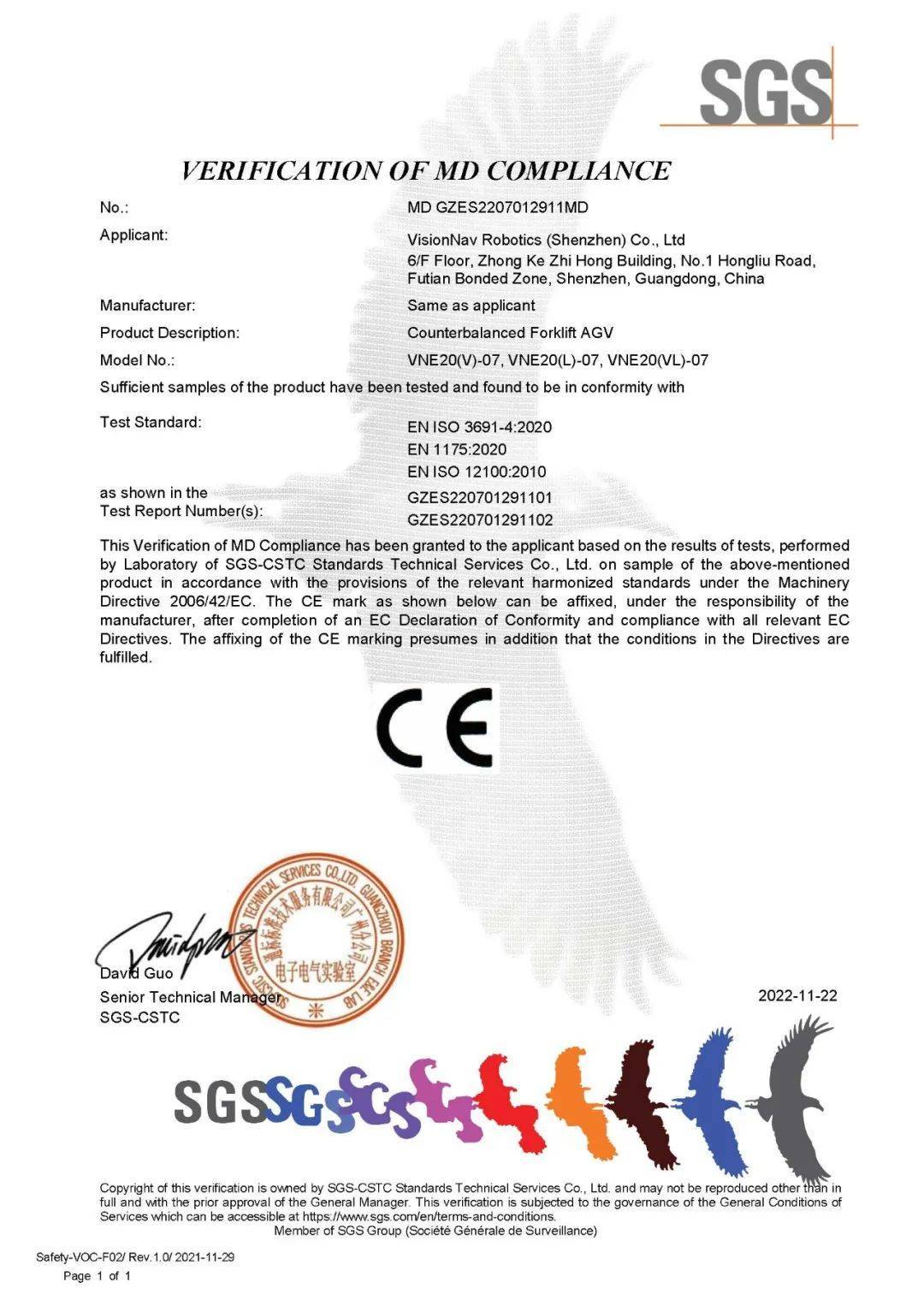
“CE”认证证书是制造商进入欧洲市场的通行证,适用于欧盟27个成员国和欧洲自由贸易协会EFTA的4个成员国。CE认证有二十多个指令测试,当一个产品覆盖多个指令时,必须通过所有相关的指令测试,才能获得CE认证证书。
未来机器人P、R、E三大系列无人叉车均通过了极为严格的MD(Machinery Directive,机械指令)指令测试及RED(The Radio Equipment Directive,无线电设备指令)指令测试,其中MD指令测试采用最新的EN ISO3691-4:2020标准,这是针对无人驾驶工业车辆及其系统安全的新标准。


新标准涵盖了更多的使用场景和操作模式,从前端应用场景的风险评估以及风险分析、安全系统硬件架构,软件安全设计、安全功能测试和现场测试等多个方面;它加强了对无人驾驶工业车辆安全的功能和车辆自动功能的验证,验证方法从旧版标准的单一功能性测试验证升级为从Designcheck、Calculation、Inspection(visualoraudible)、Measurement、Functionaltest五个方面,新标准验证方法更细致全面,新标准也被誉为“欧盟考核史上最全面也最严格”的安全标准。

新标准采用PL(Performance Level)性能等级,用于规定控制系统安全相关部件在于其条件下执行安全功能的离散等级,并要求控制系统的安全相关部分的PL必须高于或等于所要求的性能(PLr)。未来机器人P、R、E三大系列无人叉车在通过指令测试时,各项安全功能不仅完全符合所需达到的安全性能等级,同时在意外启动、超速检测、负载稳定性控制等几项安全性能指标上达到远超MD测试标准性能等级的水平,拥有极高标准的安全保证。
物流柔性边界再突破
无人叉车导航方式新格局
未来机器人除了在安全上严格要求自身的产品外,也时刻把作业效率、客户需求与痛点放在产品研发的第一位。本次通过CE认证的P、R、E三大系列无人叉车,基于视觉+3D激光导航的多模态融合导航方式,实现无人叉车使用场景的深水区突破,使得企业内部物流柔性边界再拓展。

无人叉车自进入物流市场以来,业内无人叉车的定位导航方式由最初的磁条/磁钉导航、二维码导航、激光反光板导航逐步升级为2D 激光SLAM导航。无人叉车的智能化水平越来越高,客户对于场景的突破,简易化设施、柔性化生产的需求也在一步步提高。
传统的磁条/磁钉导航、二维码导航、激光反光板导航方式都存在局限性大、部署成本高、部署时间长等缺陷,对场景的适配要求高,柔性不足。与前几者相比,虽然2D激光SLAM在这几方面都优于传统,但受限于所使用的2D激光传感器,仍然有如下常见不足:
- 2D激光SLAM无人叉车绝大部分的应用场景都局限在室内,且对地平面的倾斜程度,平整程度都有明确要求;
- 传感器视域较小,容易受到工况场景内的动态物体影响;
- 对于常见的高变化物流场景,如密集高堆叠 、密集高料笼场景无能为力,需要借助精确测量的高反条做为增强手段,但如此一来,就增加了前期施工与后期维护的成本。
此次未来机器人采用基于视觉+3D激光的多模态融合导航方式,针对客户的这些柔性需求与痛点,提供了一套领先的解决方案。未来机器人视觉+3D激光导航无人叉车应用场景不再局限于室内,不受地面平整度影响,支持常见的室内外、园区内外坡度小于15°的斜坡上下坡,实现无人叉车在园区内外、室内外场景下平滑切换。
对于常见的物流“深水区”场景,例如月台尾掏车装卸,视觉+3D激光导航无人叉车在原有的作业能力上进一步提升,支持上下月台,从而实现从尾掏车卸货、下月台再进入室内仓储的全流程定位,反之亦可。提升无人叉车的作业连贯性,从而提升装卸物流到生产物流的整体运行效率。
同时,对于物流仓储中常见的密集高堆叠、密集高料笼等高变化场景,未来机器人视觉+3D激光导航无人叉车均能出色适应与支持,无惧场景的环境变化,将无人物流、无人工厂的柔性边界再拓展。
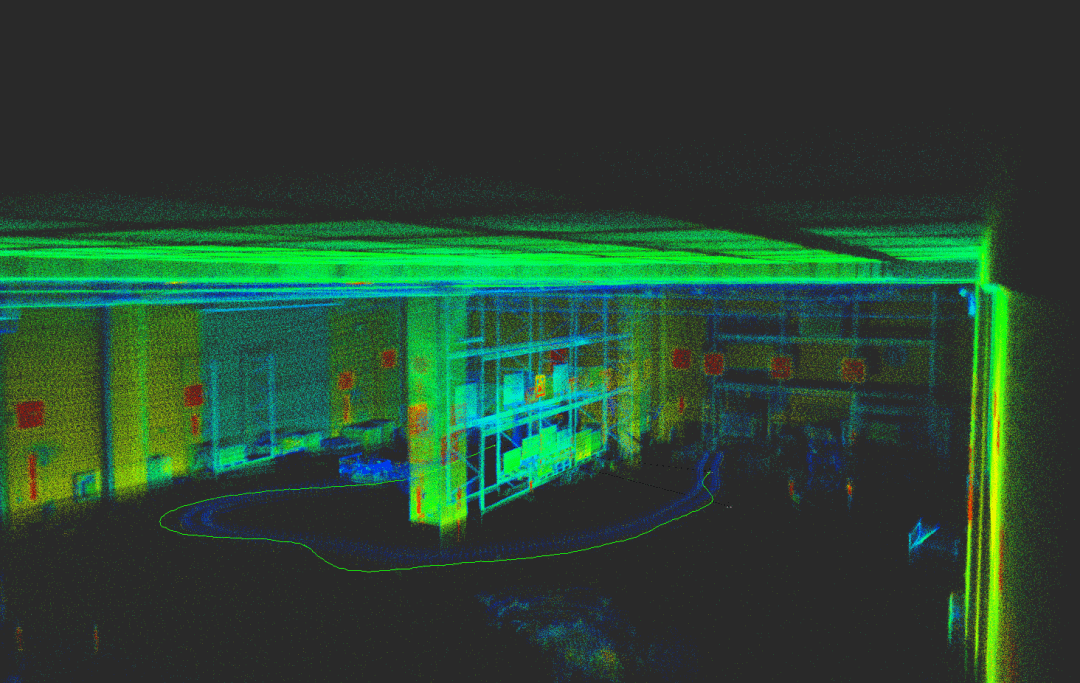
未来机器人视觉+3D激光导航系列无人叉车拓展物流柔性边界的同时,不以成本提高为前提,依然保持着一款叉车产品该有的精度与效率要求。项目前期施工环节,3D建图简便迅捷。在上万平方米的仓库内,无人叉车仅需10分钟便可完成地图模型的自动搭建;物流作业环节,未来机器人视觉+3D激光导航配合高精度3D感知技术,可以在密集地堆库、高位存取、月台装卸等复杂场景下,实现精准取放货(误差±5mm),进一步提升无人叉车作业效率与精度。
视觉+3D激光导航
项目应用验证技术实力
在被誉为内部物流 “高地”的无人装卸场景中,未来机器人通过成功落地“低栏货车无人装卸”项目,验证视觉+3D激光导航方式给无人叉车带来的效率与柔性的提升。

在知名石化企业内部物流升级项目中,室外装卸场景中存在着地面有沟坎、车厢板凹凸不平、登车桥与地面形成斜面坡度等问题,未来机器人VNE20平衡重无人叉车(含2T~3.5T 不同型号)通过搭载视觉及3D激光SLAM,提取环境图像信息,同步定位并创建自然特征地图,精准识别地面路况;同时结合智能算法与仿真建模计算,沉淀项目数据,从无人叉车行驶速度,加速度,货叉举升高度等方面进行不断调整优化,在动态复杂环境场景下实现高效安全作业。